Simple Python Code
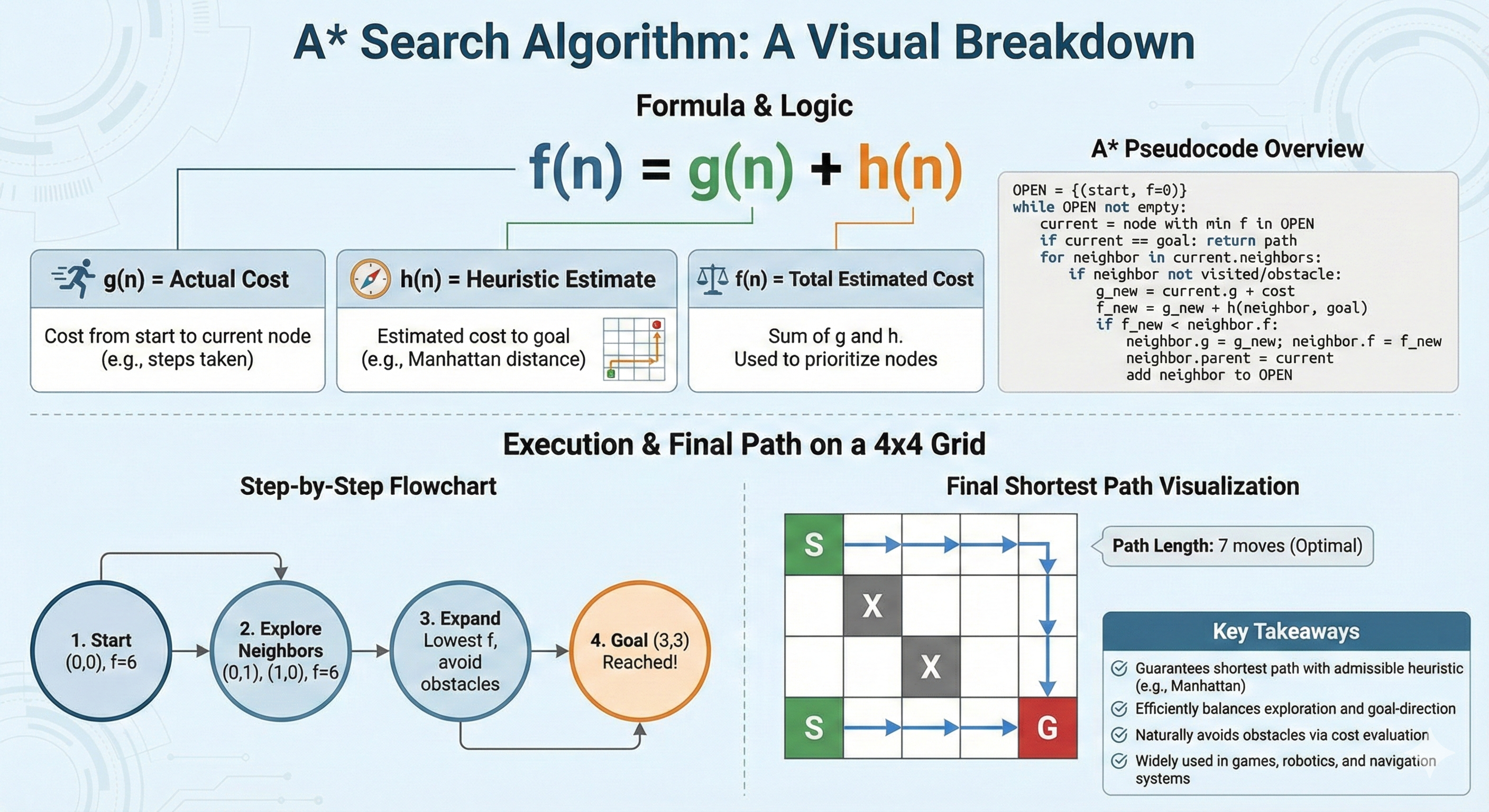
import heapq
def a_star_simple(grid, start, goal):
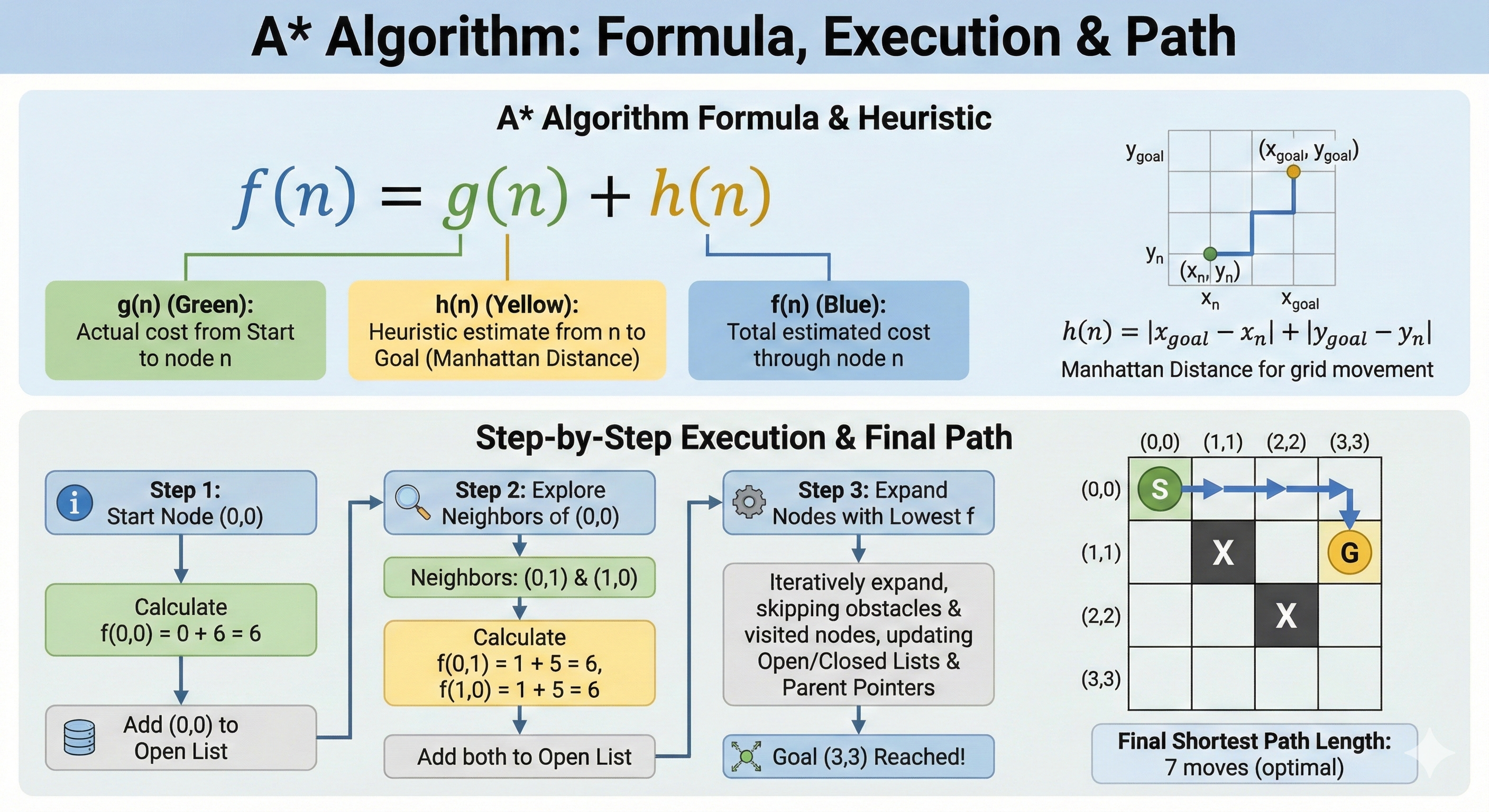
# Manhattan distance heuristic
def h(a, b):
return abs(a[0] - b[0]) + abs(a[1] - b[1])
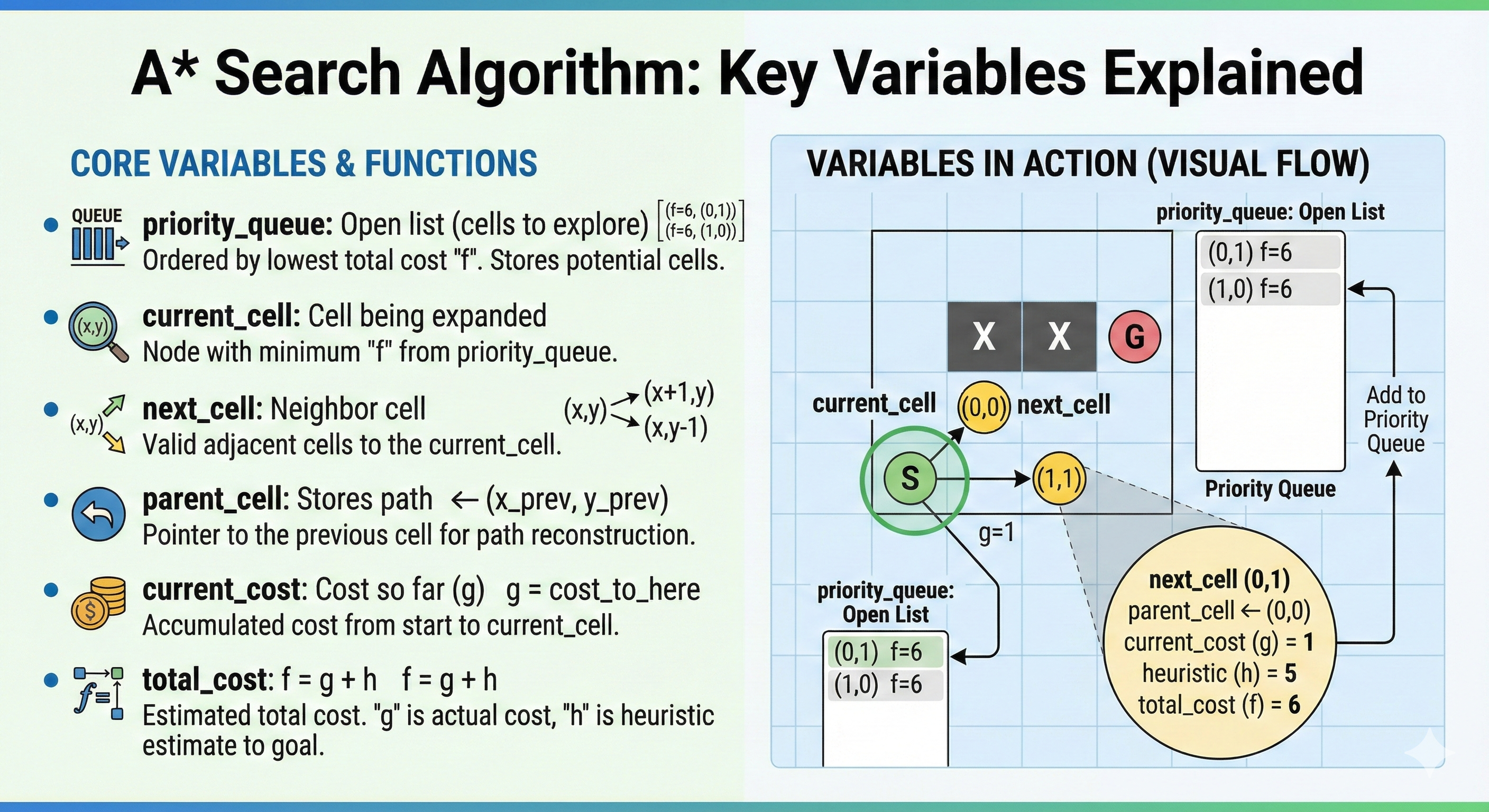
open_list = []
heapq.heappush(open_list, (0, start))
visited = {}
visited[start] = None
while open_list:
cost, current = heapq.heappop(open_list)
if current == goal:
path = []
while current:
path.append(current)
current = visited[current]
return path[::-1]
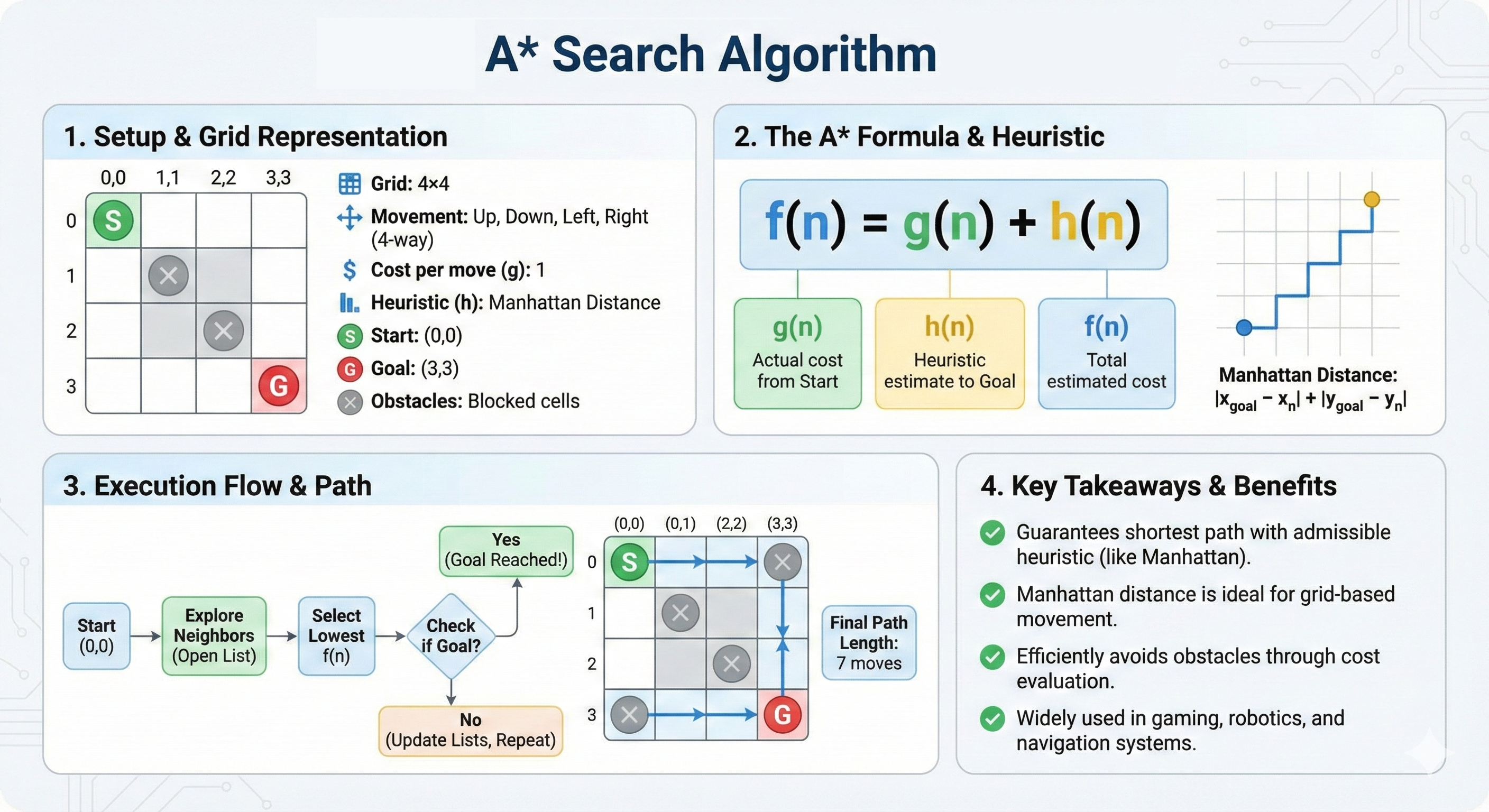
for dx, dy in [(0,1), (1,0), (0,-1), (-1,0)]:
next_cell = (current[0] + dx, current[1] + dy)
if (0 <= next_cell[0] < 4 and
0 <= next_cell[1] < 4 and
grid[next_cell[0]][next_cell[1]] == 0 and
next_cell not in visited):
priority = cost + 1 + h(next_cell, goal)
heapq.heappush(open_list, (priority, next_cell))
visited[next_cell] = current
return None
# Example
grid = [
[0, 0, 0, 0],
[0, 1, 0, 0],
[0, 0, 0, 1],
[0, 0, 0, 0]
]
print("Simple A* Path:")
print(a_star_simple(grid, (0, 0), (3, 3)))Advanced Python Code
import heapq
def a_star_simple(grid, start, goal):
# Manhattan distance heuristic
def h(a, b):
return abs(a[0] - b[0]) + abs(a[1] - b[1])
open_list = []
heapq.heappush(open_list, (0, start))
visited = {}
visited[start] = None
while open_list:
cost, current = heapq.heappop(open_list)
if current == goal:
path = []
while current:
path.append(current)
current = visited[current]
return path[::-1]
for dx, dy in [(0,1), (1,0), (0,-1), (-1,0)]:
next_cell = (current[0] + dx, current[1] + dy)
if (0 <= next_cell[0] < 4 and
0 <= next_cell[1] < 4 and
grid[next_cell[0]][next_cell[1]] == 0 and
next_cell not in visited):
priority = cost + 1 + h(next_cell, goal)
heapq.heappush(open_list, (priority, next_cell))
visited[next_cell] = current
return None
# Example
grid = [
[0, 0, 0, 0],
[0, 1, 0, 0],
[0, 0, 0, 1],
[0, 0, 0, 0]
]
print("Simple A* Path:")
print(a_star_simple(grid, (0, 0), (3, 3)))Infographics